ぎょーむ日誌 2005-05-15
2005 年 05 月 15 日 (日)
-
1010 起床.
朝飯.
コーヒー.
洗濯.
怠業.
-
かなりの雨降り.
北大構内走やめとくか.
-
1610 自宅発.
雨.
1630 研究室着.
-
またしても「カクレ」状態問題の検討に没頭してしまう
……
というか,
先月末からこの問題の周辺に
アタマがとらわれてしまっているんだけど.
いやはや,
ぢつはこれもまた一種の怠業の形態にほかならないのかも
……
-
先日,
auto-logistic model と Ising model
の対応がよーやくにして理解できてしまった.
この対応づけについて考えていくと,
今度はカクレ状態を生成する Gibbs sampler
の定式化が気になってくるわけで
……
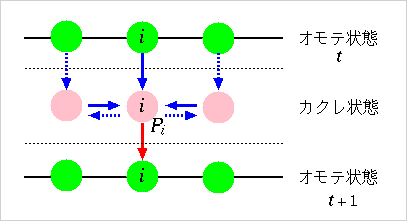
これまでは,
上の図に実線矢印 (青) でしめされてる効果を勘案して
線形予測子 (linear predictor) を構成し,
それでもってカクレ状態 i をきめればよい,
と考えていた.
-
Gibbs 分布からの標本を生成するためだけのシミュレイション
(forward 過程の Gibbs sampler とでもいうべきか)
ならば,
おそらくそれでいいんだろう,
という気がする.
-
しかしながら,
パラメーター推定
(inverse 過程)
に関してはどうか?
Gibbs sampler はオモテ状態 (t) とカクレ状態だけでなく,
オモテ状態 (t+1) も考慮すべきではなかろうか,
というあたりでつまずいているわけで
……
-
同じモデルに関して,
forward/inverse 二種類の Gibbs sampler が必要なのかしらん?
だとすると面倒だな,
などとアヤしみつつ検討をすすめてみる.
-
そしてここで興味ぶかいのは,
「オモテ状態 (t+1) も影響するはず」
という考えが正しいとすると,
カクレ状態 i を決める状態遷移確率は
オモテ状態 (t+1) の i の関数ではなく,
むしろ「i の近傍」のオモテ状態 (t+1) だと考えるべきなんだよね.
上の図の水平な破線矢印 (青) が示すようにカクレ状態 i
はその「近傍」に影響をおよぼすからだ
(というのも,
カクレ状態 i がオモテ状態 (t+1) の i には影響しない,
と考えないと尤度方程式が構成ができないだろう,
というのがこの推定の重要な部分なんで).
-
なんだかよくわからぬまま撤退.
2035 研究室発.
2050 帰宅.
晩飯.
-
カクレなハナシのつづき.
-
推定のための Gibbs sampler はオモテ状態 (t+1)
からも影響をうける
-
そのときに場所 i に影響をおよぼすオモテ状態 (t+1)
は「i の近傍」の状態である
という考えが正しければ,
カクレ状態 i の状態遷移確率はどう書けるのだろうか?
これは先日あきらかになった Ising model との対応から導出できるはずで
……
やってみると,
どうも形式的には logistic 的な関数となっているなぁ.
-
これって正しいのか?
-
どういう Gibbs sampler が必要か,
という問題は推定方式に依存するのか?
-
EM アルゴリズムで期待対数尤度最大化するなら
素朴な Gibbs sampler でよい
-
Bayesian inference の場合は
オモテ状態 (t+1) まで考慮した Gibbs sampler
が必要である
……
うーん,
どうなんでしょね.
-
[今日の運動]
-
[今日の食卓]
- 朝 (1040):
米麦 0.6 合.
キュウリ.
サケの電磁波蒸し.
炊飯器はいぜんとしてコワれているので,
鍋炊飯生活が続いている.
- 昼 (1410):
米麦 0.6 合.
ニンニクの茎・卵の炒めもの.
ワカメスープ.
- 晩 (2200):
米麦 0.8 合.
キュウリ.
キャベツ・ブナシメジのシチュー.